Researchers creating personalized robotic limb to reduce work intensity
Ankle foot optimization research Heading link
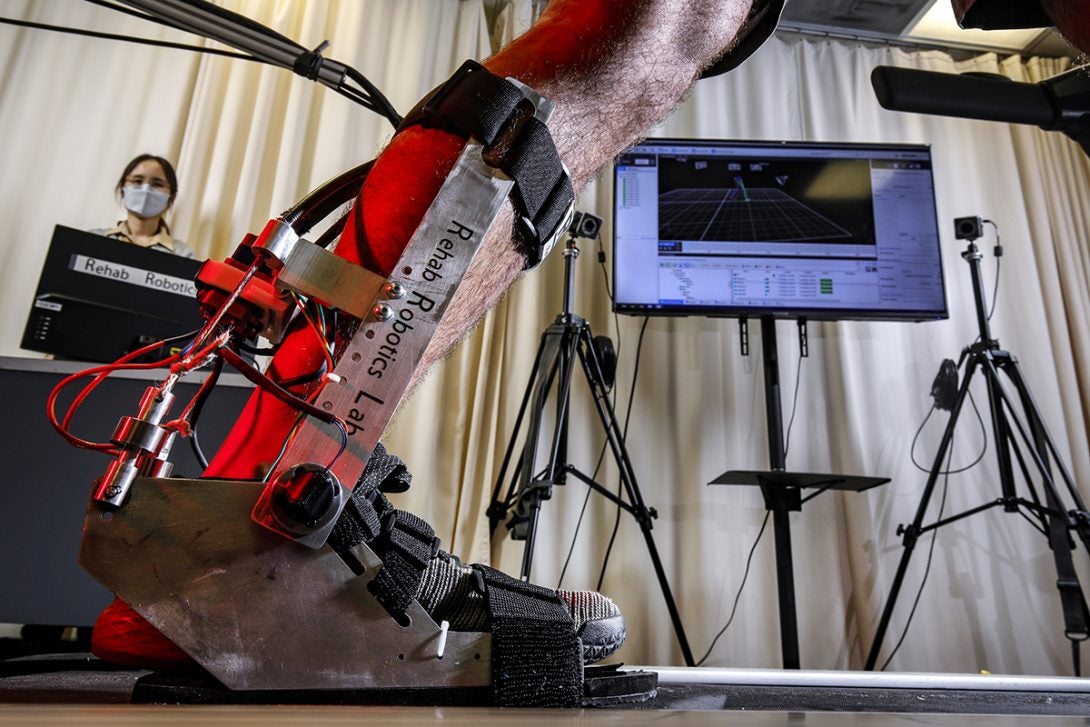
A volunteer participates in robotic ankle-foot device optimization research in Professor Myunghee Kim’s Rehabilitation Robotics Laboratory in the Department of Mechanical and Industrial Engineering at UIC.
Manufacturing, warehousing, building trades, and other physically intensive professions involve safety hazards and repetitive movements that can lead to work-related musculoskeletal disorders that can sideline an employee or cut their career short.
According to the insurance company Liberty Mutual, overexertion related to manual material-handling tasks, such as lifting, pushing, and holding, resulted in more than $13 billion in costs in 2019—nearly 25 percent of the total for the year—and ranked first among causes of disabling injuries.
To help solve this problem, assistant professors Myunghee Kim and Heejin Jeong, both in mechanical and industrial engineering at UIC, are collaborating to develop a personalized lower-limb assistive wearable robot that reduces human effort during physically intensive activities. It will be an “embodied intelligent system,” meaning that it senses environments and users and provides action through mechanical assistance to the user’s joints.
“The robot works by sensing a user’s physical effort using soft-wearable electronics and responding accordingly to reduce this effort,” Kim said. “This work has significant applications in factory labor involving weights, as overexertion injuries are costly and frequently disabling.”
To make the robot a reality, the researchers have identified three main objectives that contribute to their goal. The first is customization, a process they will improve by first finding new ways to accurately estimate the user’s physical effort during an activity.
“If the wearable robot does not fit a person in an appropriate way, it can prevent a motion and cause an injury,” said Kim.
The second objective is to enhance soft-wearable electronics with the goal of improving and replacing conventional sensors, which are rigid and uncomfortable. The third objective is to integrate and evaluate the personalized assistance achieved during physically intensive activities.
“This task will use appropriate metrics such as energy expenditure rate of the task and muscle activity,” said Jeong.
The work will result in customized assistance available, while evaluating the physical and cognitive status of the user, and providing real-time feedback via emerging display technologies, such as augmented reality.
“The evaluation outcomes can be applied to mitigate or prevent existing hazards and resulting injuries to workers,” added Kim.
In addition to overseeing all aspects of the project, Kim is designing an overall personalized assistance framework, the machine-learning approach for user effort and activity estimation, and robotic device control.
Jeong is responsible for evaluating the newly developed robotic ankle-foot device to determine the potential of custom-designed wearable electronics for the workplace.
“One of my objectives is to figure out how cost-effective it is,” added Jeong.
Another of Kim and Jeong’s collaborators, Woon-Hong Yeo, an assistant professor at Georgia Tech, will contribute soft wearable electronics that can be used to improve the quality of robot assistance. Kim noted that these sensors are useful beyond robotics, including in medical applications such as diagnosis, monitoring, and therapeutics.
In addition, the project integrates research and education by improving a project-based course on wearable robotics and supporting graduate and undergraduate student mentoring in independent research and thesis studies in a vertically integrated team.
The research is funded by a three-year National Science Foundation grant in the amount of $749,608 for a project titled Collaborative Research: NRI: INT: Customizable Lower-Limb Wearable Robot using Soft-Wearable Sensor to Assist Occupational Workers. The UIC researchers received $449,235, and the researchers at Georgia Tech received $300,373.
Learn more about Kim’s research at Rehab Robotics Lab.
Learn more about Jeong’s research at Human-in-Mind Engineering Research Lab.